Diario elettrico GreenGo Icaro: il CAN-BUS
La centralina della mia Icaro ha il CAN-BUS abilitato (notare che l’abilitazione fa lievitare il costo di 80 euro su 800 al momento dell’ordine), il che significa che è possibile collegarsi con un paio di fili alla centralina per leggere molti dati interessanti.
Pare che dalla KHB72701 sia possibile leggere questi dati:
Pin del connettore J1:
- 5, 7, 13: GND/RTN
- 10: CAN bus high
- 11: CAN bus low
Per leggere i dati tramite una Arduino o simili è sufficiente un apposito shield:
- SeedStudio CAN-BUS Shield V2 – $25
- Elecfreaks CAN-BUS Shield – $12
- Sparkfun CANBUS shield – Robotitaly 713262 (Italia) – €25,00
- CAN BUS Shield For Arduino – Robotitaly 120370 (Italia) – €25,00
- Seedstudio CAN-BUS Shield V2 – Robotitaly 809151 (Italia) – €27,00
- Robotics3d SF-DEV-10039 (Italia) – €38,00
- AptoFun CAN-BUS Shield MCP2515 with TJA1050 – €9,00
In realtà è anche possibile che da qualche parte sia nascosto un connettore standard OBD, devo cercare bene sotto il cruscotto prima di avventurarmi nell’impresa.
Studi per stampa 3d spina mennekes per colonnina di ricarica (puntata 3)
Dai miei recenti studi sullo standard IEC 62196 relativo alle spine di ricarica per veicoli elettrici risulta che potrebbe essere possibile stamparsi una spina in proprio spendendo solo poche decine di euro mediante un servizio di stampa online come www.shapeways.com o www.sculpteo.com .
Una spina Mennekes sfusa costa infatti, acquistata online, dai 100 ai 200 euro (!!!), e il motivo è da ricercarsi in specifiche molto particolari: una spina Mennekes deve poter reggere fino a 70 ampere, ci si deve poter camminare sopra con la macchina senza che si rompa (!!! Così dicono le specifiche!), e deve essere totalmente sicura, impedendo il contatto accidentale delle dita con i pin sotto tensione. Il risultato è una spina fatta così:

Tuttavia, ho trovato tre di “scappatoie” nello standard, che potrebbero permettere di stampare una spina funzionale di dimensioni minimali.
Scappatoia 1: non ci sono specifiche precise e dettagliate per il manico, ma solo per l’estremità, che è quella, ovviamente, che si interfaccia effettivamente con la colonnina; quindi l’essenziale è disporre di questo pezzetto di plastica” lungo 44,5 mm e largo 52×45 mm.
Scappatoia 2: non solo; i 7 buchi di cui è dotata la spina… in realtà non sono necessari! Il progetto iniziale prevedeva infatti una normale spina con pin sporgenti, ma è stato poi abbandonato per motivi di sicurezza, quando si pensava che le spine ai due lati del cavo sarebbero state uguali; in quel caso, una volta inserita una spina nella colonnina, sui pin dell’altra spina ci sarebbe stata corrente, in caso di guasto all’elettronica di sicurezza della colonnina, il che ovviamente non era accettabile. Solo che a quanto pare, adesso le cose sono un po’ cambiate: un cavo mennekes ha due spine diverse alle due estremità, una da infilare nella colonnina, e una da infilare nella presa dell’auto:

Questa spina replica in pratica la forma della colonnina:


Quindi in sostanza il cavo sarebbe fatto così (non l’ho ancora verficato nella pratica: l’unico cavo che ho visto è quello del carsharing di Roma per la C-Zero, e quello sul lato-auto non ha una Mennekes ma una spina americana Tipo 1):

Dal momento che la corrente proviene dalla colonnina e non dall’auto (a meno che non sia un’auto “speciale” già predisposta per il “vehicle to grid”, cioè l’alimetazione dell’impianto elettrico di casa), se i pin sul lato-colonnina sono sporgenti e si possono toccare, non c’è pericolo di restare fulminati! Anche perchè al momento di inserire la spina nella colonnina, la si inserisce al’interno di uno shutter di protezione, quindi non si riuscirebbe a toccare i pin quando sono sotto tensione nemmeno volendo.
Scappatoia 3: L’ultima scappatoia deriva dalla seconda: i buchi si sono resi necessari per permettere ai pin di inserisi nella presa pur non potendo essere toccati da fuori, per cui i pin sono di fatto incapsulati nella presa, e intorno ad essi resta libera soltanto la zona del “buco”, in cui va a inserirsi la presa. Ma visto che abbiamo detto che i pin non sono mai sotto tensione, possiamo eliminare proprio tutto il contorno, e tornare al modello iniziale di pin sporgenti.
Quindi di fatto quello che serve è soltanto la piastra in plastica in cui sono inseriti i pin. A questa bisogna però aggiungere anche la parte in plastica che permette alla colonnina di tenere bloccata la spina durante l’erogazione, così nessuno può fregarsi il cavo…
Quindi, ecco come sta evolvendo il mio studio di modellazione 3d della “spina mennekes minimale”, progettata per permettere di ricaricare da colonnine Mennekes gli scooter elettrici, che sicuramente NON producono corrente:
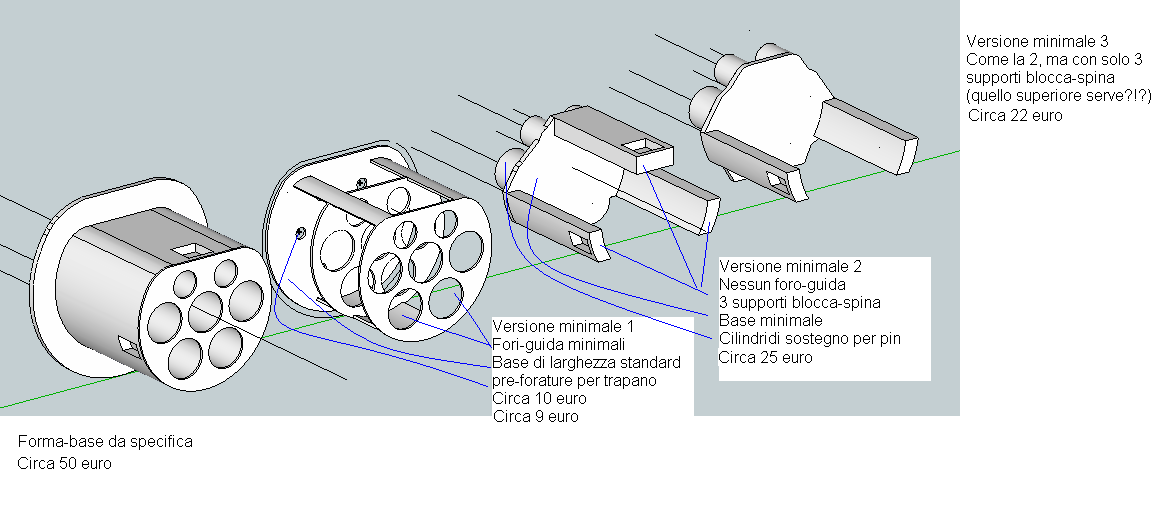 Probabilmente la versione finale della mia spina sarà una via di mezzo tra la 1 e la 2, cioè con la piastra bucata in fondo, giusto per far presa meglio nella… presa, ma non la piastra bucata intermedia, mentre in compenso avrà in più due o tre dei supporti blocca-spina.
Probabilmente la versione finale della mia spina sarà una via di mezzo tra la 1 e la 2, cioè con la piastra bucata in fondo, giusto per far presa meglio nella… presa, ma non la piastra bucata intermedia, mentre in compenso avrà in più due o tre dei supporti blocca-spina.
Il mio scooter poi, in particolare, richiede anche correnti di ricarica minimali (4 ampere), per cui non servirà nemmeno un costosissimo supercavo di rame con 5 conduttori da 6 mm2 per ricaricarlo (cinque conduttori perchè i cavi Mennekes sono predisposti per la trifase), quindi anche il cavo in rame potrà essere economico. secondo me posso cavarmela con 50 euro invece che con 200.
Aggiornamento:
Queste dovrebbero essere le misure dei pin:

Visto che a misurarli nello schema, i pin di potenza risultano da 7mm mentre dalle specifiche sarebbero da 6mm, ipotizzo che i pin pilota da 4mm dovrebbero essere da 3mm…. ma ho il dubbio che esistano solo da due. Quelli di potenza dovrebbero essere lunghi 20mm, tranne la massa che dovrebbe essere 29 mm.
In ogni caso… non riesco a trovare nè gli uni nè gli altri in siti di componenti tipo questo:
Sto cercando una cosa tipo questa:

Però se fossero con fissaggio a vite invece che a incastro sarebbe molto meglio; credo che in inglese si dica “thread mounted”, ma non li trovo…
Sarebbe utile anche se il cavo stesso si potesse fissare a vite invece che a saldare o a crimpare, ma chissà come si dice in inglese…
Link agli standard per colonnine di ricarica:
- Standard 62196, parte 1 , che descrive le specifiche elettriche della ricarica con connettore “Tipo 2”;
- Nella parte 2 (62196-2) ci sarebbero invece le specifiche geometriche della spina Mennekes VDE Tipo 2 ma non riesco a trovarla.
- Qui invece c’è il SAE J1772 (standard mericano ,spina a 5 poli) con le specifiche del PWM
Ed ecco una tristissima immagine…

Schema elettrico circuiteria di controllo spina Mennekes VDE (Tipo 2) per ricarica auto elettriche (puntata 1)
v. anche spine di ricarica per scooter elettrici – test sul campo
v. anche Colonnine ricarica e scooter elettrici
Il 26 marzo scorso l’Unione Europea ha stabilito che il fomato da usare in Europa per le spine di ricarica sia il Tipo 2 – Mennekes – VDE-AR-E_2623-2-2 , basato sugli standard 60309 e IEC 61851-1:2001

Questo significa che i veicoli attualmente equipaggiati con spina SCAME prima o poi non potranno probabilmente più ricaricarsi da strutture pubbliche, una volta che esse si saranno adeguate eliminando la SCAME.


In altre parole, la Renault Twizy e qualunque scooter elettrico attualmente in circolazione, la maggior parte dei quali non ha nemmeno la SCAME ma una semplice shucko:

In un vecchio post avevo illustrato come fare ad implementare in una SCAME “vergine” il circuito di controllo necessario affinchè le colonnine di ricarica possano riconoscere correttamente la spina e iniziare l’erogazione.
Qui tenterò di fare lo stesso per la spina Mennekes VDE, ben più complessa, e anche enormemente costosa (l’adattatore più economico costa dai 200 euro in su! la sola spina 100!).
Fino ad ora quello che sono riuscito a capire da varie fonti (blog, wikipedia, forum, standard, siti, appunti,…) è riassunto in questa immagine, che però resterà solo una bozza finchè non avrò modo di verificare personalmente che non ci siano scritte inesattezze.

E’ importante che la resistenza da 1300 ohm sia in serie a un interruttore che la esclude: quando l’interruttore è aperto (resistenza esclusa), la colonnina capisce che l’auto si è appena connessa (stato “B”), ma non inizierà ad erogare finchè l’interruttore non verrà chiusa, cambiando la resistenza equivalente vista dalla colonnina da 2700 a 882 Ohm (stato C) (parallelo di resistenze = 2700*1300/(2700+1300)).
Esiste un terzo “stato D” nel caso il veicolo sia al piombo e richieda l’attivazione dell’aerazione del vano batterie, ma non ci interessa, comunque in quel caso la resistenza equivalente deve essere pari a 246 ohm.
Le resistenze devono essere, da specifica, molto precise, con tolleranza del 3%.
Il diodo deve essere uno qualunque al silicio da 0.7 V (0.55-0.85) di caduta di tensione.
Un’altra resistenza, da 1000 Ohm, si trova all’interno della colonnina e quindi non ci dovrebbe interessare.
Non resta quindi che procurarsi una spina vuota… ma anche una spina vuota sembra costare parecchie decine di euro!
Quindi bisognerebbe provare a stamparsela in 3d tramite Shapeways o simili, senza bisogno di spendere 1000 euro per una stampante: essendo piuttosto grossa, potrebbe comunque costare parecchio… ma magari meno di 100 euro!
Il problema è che al momento non sembrano esistere modelli 3d della spina, quindi bisognerà ricavarseli dalle misure… che però non si riescono a trovare, quantomeno non tutte; questo è il documento più completo che sono riuscito a trovare, che include anche la lunghezza dei pin; manca però il diametro, che si dovrà quindi ricavare a mano dalle altre dimensioni.
Fonti:
Resistenze di sicurezza:
Resistenze di capacità di erogazione:
Dimensioni spina:
- http://www.bals.nl/resources/PDF/Prospekt_einleger_en.pdf
- http://elbil.pbworks.com/f/MENNEKES+and+EV.pdf
Aggiornamento:
su veicoli già dotati di SCAME con circuito di controllo potrebbe sorgere questo problema:
 Il problema, cioè, è che su un mezzo già equipaggiato con spina SCAME è presente un circuito formato da un diodo e una resistenza; anche cambiando la spina e sostituendola con una Mennekes, la resistenza rimarrebbe all’interno del veicolo, e verrebbe a trovarsi in parallelo con quelle presenti nella Mennekes “artigianale”, generando resistenze equivalenti non previste dallo standard, che quindi probabilmente impedirebbero alla colonnina di riconoscere correttamente il mezzo.
Il problema, cioè, è che su un mezzo già equipaggiato con spina SCAME è presente un circuito formato da un diodo e una resistenza; anche cambiando la spina e sostituendola con una Mennekes, la resistenza rimarrebbe all’interno del veicolo, e verrebbe a trovarsi in parallelo con quelle presenti nella Mennekes “artigianale”, generando resistenze equivalenti non previste dallo standard, che quindi probabilmente impedirebbero alla colonnina di riconoscere correttamente il mezzo.
AGGIORNAMENTO:
Il documento linkato sopra spiega in dettaglio il funzionamento della circuiteria di sicurezza, che è suddivisa tra colonnina e veicolo. Non potendo copiare qui le immagini e il testo del documento per motivi di copyright, mi limito a illustrare i punti salienti.
Ad esempio, lo standard dice che nel veicolo deve essere presente un circuito composto da un diodo e da una resistenza: lo scopo del diodo è “tagliare” l’onda quadra (PWM – Pulse Width Modulation) prodotta dalla colonnina, in modo che quando quest’onda torna alla colonnina stessa, essa presenti solo i fronti negativi; in questo modo la colonnina capisce che al cavo non è “collegato” il “dito di un bambino curioso” (così dice lo standard…), e la spina non è caduta in una pozzanghera; in questi casi, infatti, la colonnina vedrebbe un’onda completa e “un po’ di resistenza”, dovuta al passaggio della corrente nel dito o nella pozzanghera; il diodo, invece, non esiste in natura… quindi se all’onda “manca un pezzo” vuol dire che la corrente sta passando dentro a un veicolo e non dentro a una pozzanghera, quindi la colonnina può erogare corrente.
L’onda quadra ha anche un’altra funzione: codificare e comunicare al veicolo la quantità di corrente erogabile dalla colonnina. Si usa una formula piuttosto complessa per codificare i valori di corrente, comunque i principali sono:
- 10% = 6A = 1440 W = 1,4 kW = 10 km/h
- 20% = 12A = 2880 W = 2,9 kW = 20 km/h
- 30% = 18A = 4320 W = 4,3 kW = 30 km /h
- 40% = 24A = 5760 W = 5,8 kW = 40 km/h
- 50% = 30A = 7200 W = 7,2 kW = 50 km/h
- 66% = 40A = 9600 W = 9,6 kW = 67 km/h
- 80% = 48A = 11520 W = 11,5 kW = 80 km/h
- 90% = 65A = 15600 W = 15,6 kW = 108 km/h
- 94% = 75A = 18000 W = 18 kW = 125 km/h
- 96% = 80A = 19200 W = 19,2 kW = 133 km/h
L’ultimo valore indica l’autonomia ricaricabile in un’ora in corrispondenza dei vari valori di potenza.
Il veicolo deve impostare il caricabatterie di bordo in modo che non assorba più della corrente comunicata come disponibile dalla colonnina tramite il duty cycle PWM (in caso contrario la colonnina “salterebbe”).
Sui cavi di ricarica portatili l’ICCB (In Cable Control Box) svolge la funzione della colonnina di ricarica, con la differenza che si può impostare a mano la quantità di corrente che eroga, e quindi anche quella che preleva dalla presa di casa, che normalmente è limitata a 3 kW; in genere conviene quindi ricaricare a 1440 W, per lasciare un po’ di margine per gli altri apparecchi di casa: le lampadine accese tutte insieme possono arrivare ad assorbire 100W se fluorescenti o a LED, ma anche 1000 W se sono vecchie lampade a incandescenza (è ora di buttarle!). Un PC fisso può assorbire 300-500W, un televisore intorno ai 300W.
Diario elettrico / scooter fotovoltaico – 13/1/2013: Ritorno a 12V
Dopo un paio di mesi di sperimentazione con nuovo regolatore di carica (Steca Solarix 2020) e nuovo inverter (Sinus 24V/1000W), ho deciso di tornare a fare prove a 12V… con un inverterino cinese da 300W!
Sì, perchè col sistema a 24V, nonostante avessi aggiunto anche un pannello, per un totale di 480Wp, riuscivo ad avere un’autonomia di illuminazione di appena mezz’ora! (con 50W di assorbimento). Indecente rispetto alle 6 ore di quest’estate… quando però avevo un MPPT EPSolar (morto carbonizzato) e un impianto a 12V.
Purtroppo le variabili sono troppe per riuscire a isolarle e a capire chi e come e quanto influenza la resa: giorni nuvolosi o soleggiati, sole alto o basso sull’orizzonte, maggiore o minore ombreggiatura della casa… e questo solo per parlare delle variabili stagionali! A cui poi devo aggiungere quelle legati all’uso di MPPT o PWM, di 12V o 24V… insomma, una gran baraonda!
Lo scopo dell’esperimento attuale è capire se un regolatore da 24V/20A, “dato” come in grado di reggere al massimo 480 Wp MA con impianto a 24V, riesce a gestire 480 Wp con impianto a 12V: potrebbe sembrare di no, visto che 480/12 fa 40 Ampere, il doppio del sopportabile…. ma secondo me il calcolo (e quindi il limite di specifica) non ha senso, visto che il massimo che ognuno dei miei pannelli è in grado di erogare non supera gli 8A! Avendoli collegati in parallelo, il massimo che possono dare è ovviamente 16A, quindi non vedo come il limite dei pannelli debba essere 480 Wp! Comunque, lo sapremo presto, alla prima giornata di sole: la fumata bianca, in questo caso, non sarà di buon auspicio, ma indicherà la prematura morte di UN ALTRO povero regolatore di carica vittima dei miei esperimenti!
Se invece sopravvive, avrò scoperto finalmente come interpretare le (poche) specifiche tecniche date per i vari regolatori di carica in vendita: ignorare i Wp, ma scoprire i V e A massimi sia in entrata che in uscita: per me è ancora un mistero capire se quando scrivono “20 A massimi” li intendono in entrata, in uscita, o in entrambi! Comunque, poi basterà confrontare quei valori con Voc e Isc (tensione di Open Circuit e corrente di Short Circuit), anche se probabilmente bastano anche i valori Vmp e Imp (Maximum Power), inevitabilmente più bassi: un pannello collegato non sarà mai in condizione di circuito aperto o corto circuito!
Al massimo, la corrente di corto circuito può forse essere utile per dimensionare i fusibili.
Sto anche ultimando il logger di energia definitivo, anzichè con fili penzolanti, così forse riuscirò finalmente a fare grafici giornalieri.
Comunque, per il momento la ricarica dello scooter tramite energia fotovoltaica è fuori discussione.
Diario elettrico 28/10/2012 – Scooter fotovoltaico: ricominciamo (per la 3a volta…)
Dopo aver letteralmente fuso regolatore di carica e inverter, ricominciamo: devo ricomprarli entrambi.
Messi per sempre da parte gli EPsolar cinesi difettati, dopo aver gironzolato un po’ e studiato un BEL po’, ho desunto che coi miei nuovi pannelli da 6o celle / 240 Wp non mi serve un costosissimo regolatore MPPT da 250 euro, ma è sufficiente un più economico PWM da 80 euro; la ragione è che la tensione di un pannello da 60 celle è di circa 36 Volt, che rispetto ai 24 V delle batterie significa il 50% in più, e per di più la tensione effettiva del pannello (anzichè quella a circuito aperto) è anche inferiore, quindi la quantità di tensione che l’MPPT convertirebbe in corrente sarebbe così bassa che “il gioco non vale la candela”.
Quindi, per il regolatore ho optato per un interessante Western CO WR20 da 20A comprato su Ipersolar per 82,50 euro. L’idea è di collegare in parallelo due pannelli da 240Wp/8A, quindi 16 A totali, quindi il 20A va più che bene.

E’ interessante perchè ha un bel display LCD invece che 3 led, ed ha anche le soglie di tensione regolabili.
Molto più complicato invece scegliere l’inverter: dopo la brutta esperienza del Sinergex PureSine 24V 350W che si è rivelato troppo poco potente per il mio caricabatterie da 250W/430VA (cosFi di 0,58 !!!), visto che in realtà era un Sinergex/Victron da 350 VA/250W, devo cercarne uno più grosso. Solo che nel frattempo ci ho preso gusto e quindi vorrei ANCHE alimentare le luci di casa (100W contemporanei), quindi mi servirà ancora più grosso…

Grafico tipico di una mia ricarica giornaliera: meno di 700 Wh, 250W/430Va
Solo che i venditori non specificano mai se indicano W o VA nelle loro schede tecniche, quindi sto un po’ impazzendo.
Comunque, ipotizzando di dover sommare i 430 VA ai 100 VA/W di potenza delle lampadine (chissà quanto hanno di cos FI quelle a incandescenza, boh…), mi servirà un inverter da 530 VA, quindi diciamo 600.
L’impianto è a 24V, per due motivi:
– non serve regolatore MPPT
– posso collegare i pannelli in parallelo, e siccome sono messi in una pessima posizione, spesso uno dei due potrebbe essere in ombra
Quindi devo cercare un inverter a onda sinusoidale pura da 24V/600VA ; devo però ancora capire la faccenda del “soft start”, una tecnologia dei nuovi inverter per evitare picchi di potenza in avvio: mi chiedo se però non rovinino lampadine a fuorescenza e caricabatterie, essendo pensatiper motori elettrici…
Per esempio ho letto che bisognerebbe accendere PRIMA le lampadine fluoresecenti e POI l’inverter, cosa impensabile/irrealizzabile per me, visto che l’inverter starà in giardino!
Trovo informazioni discordanti in merito agli svantaggi e l’applicabilità dell’onda modificata c’e’ chi dice possa alimentare lampade fluorescenti ma non lampade al neon (???), c’è chi dice che puo’ alimentare caricabatterie, ma non TUTTI i caricabatterie,… boh???
Gli iInverter ad onda sinusoidale modificata sono adatti ad alimentare PC, Notebook, televisori, radio, Hifi, caricabatterie x cellulare, ed altri apparecchi elettrici . Non sono invece consigliati per elettrodomestici quali frigo, lavatrice, microonde, nè per luci al neon o carichi induttivi quali pompe
http://www.shop.ilportaledelsole.com/Onda-sinusoidale-modificata
Certain rechargers for small nickel-cadmium batteries can be damaged if plugged into a modified sine wave inverter. In particular, two types of appliances are susceptible to damage:
- Small, battery-operated appliances such as flashlights, cordless razors and toothbrushes that can be plugged directly into an AC receptacle to recharge.
- Certain battery chargers for battery packs that are used in some cordless hand-tools. Chargers for these tools have a warning label stating that dangerous voltages are present at the battery terminals.
http://www.donrowe.com/inverters/inverter_faq.html#modified
Ho provato a contattare la Donrowe, vediamo cosa mi dicono…
Se solo questo fosse DAVVERO da 400W nvece che da 400VA, sarebbe perfetto per il mio caricabatterie; se fossero invece VA… be’, andrebbe comunque benino.
Contatto anche loro e vediamo un po’, il datasheet i VA manco li cita!
Se fossero 300W veri potrebbe andare bene anche questo, mai VA quanti saranno?!?
Questo sembra un bell’inverter sinusoidale economico.
Ed è anche dimostrato che è sinusoidale! http://www.youtube.com/watch?v=t_OF2M5i6F8
Quest’altro video mostra la differenza tra onsa sinusoidale pura e modificata:
http://www.youtube.com/watch?v=CzmfsU06qN8&feature=related
Interessanti inverter sinusoidali economici ma provenienti dall’inghilterra anzichè dalla Cina (quindi niente dogana):
1000W – 170 sterline (211,00 euro)
1500 W – 230 sterline (286,00 euro)
Non capisco però cosa significhi questa tabella:

Proverò anche a chiedere lumi su questo forum:
http://www.cruisersforum.com/forums/f14/charging-drill-batteries-from-inverter-bad-79125.html
Inverter 24V/500W onda poura UK, 200 sterline:
http://www.sunshinesolar.co.uk/khxc/gbu0-prodshow/VPS50024.html
Questo mi sembra un po’ truffaldino: onda pura da 500 W a 80 euro…
Test su strada Govecs GO! S3.4
[nota: titolo del post modificato; era “Rivenditore GOVECS ed Etropolis a Roma – Zona Bufalotta”]
Oggi sono stato a visitare il rivenditore di scooter importati dal consorzio Energeko, quello che a Dragona (RM) sta allestendo un punto vendita di scooter e minicar elettriche, trattato in altro post.
FR Service snc
Via della Bufalotta 877-879-879/a
00139 Roma
tel.06/87132624 fax 06/87232434
Sito facebook: LINK
Questo della Bufalotta mi sta molto più comodo perchè posso anche arrivarci anche col mio povero scooter ormai ridotto al lumicino…
Al momento l’unico scooter disponibile per la prova era un Govecs GO! S3.4 (sito ufficiale), ma c’erano esposti anche il GO! S1.2, il GO! S1.4 S2.4, (l’S1.4 con batterie estraibili al litio non è ancora disponibile), e vari Etropolis, anche il Miami a batterie estraibili; mi riprometto quindi di tornarci… e provarli tuti! 🙂
Partiamo dalla cosa più “interessante”: il prezzo! L’ S3.4, il più veloce e potente, costa 6.900 euro (temporaneamente in offerta a 6.500 eur0). Una cifra a mio avviso esorbitante, visto che è quasi il prezzo di un’auto nuova… Un prezzo da mercato ancora di nicchia, purtroppo.
Bizzarro che neanche sul sito della casa madre, oltre che nei negozi, specifichino la potenza del motore, ma per fortuna la targhetta del motore era ben visibile sul mezzo che ho provato: risulta che la tensione nominale è di 43 Vrms e la corrente nominale 56.9 Arms; moltiplicandoli viene 2446… ma non sono certo che siano Watt, visto che V e A vengono dati in rms (RootMeanSquare, Valore Quadratico Medio):
<img src=”http://upload.wikimedia.org/wikipedia/commons/thumb/8/8a/Sine_voltage.svg/220px-Sine_voltage.svg.png”>
Non so come normalmente venga calcolata la potenza degli scooter, cioè se moltiplicando Vrms e Arms o V e A; nel secondo caso, siccome Vrms= 1/sqrt(2) * V, risulterebbe:
- A= sqrt(2) * Arms
- V= sqrt(2) * Vrms
Quindi:
- A= 80
- V=60
In questo caso, si tratterebbe di un motore da 4800 W.
Sul motore invece è indicata come potenza nominale 3,9 kW.
In ogni caso, quello che conta, si sa, sono le prestazioni. E quelle dell’S3.4 sono davvero eccezionali.
Benche’ la partenza sia molto soft grazie all’accurata programmazione della centralina (che, a proposito, risulta essere una SEVCON G8035 del costo di 995 dollari, sito ufficiale) , la ripresa è fenomenale, anche in salita, e raggiungere la velocità massima di 80 all’ora (77 indicata sul tachimetro, 90.4 indicata dal GPS del mio SonyEricsson Xperia Mini Pro) è questione di “un attimo”; purtroppo non posso fornire dati più precisi, perchè nonostante abbia fatto due tratti appositamente “da 0 a 80 km/h” col GPS logger acceso in tasca… in entrambi i tratti il logger si è “incantato” (spiaccicato dall’incredibile accelerazione? 😉 ), perdendo parecchi campioni, mettendosi a campionare ogni 8-10 secondi invece che una volta al secondo!
Primo log (GOVECS):
| orario | km/h |
| 22/09/2012 9.06.21 | 24 |
| 22/09/2012 9.06.22 | 18 |
| 22/09/2012 9.06.24 | 0 |
| 22/09/2012 9.06.25 | 0 |
| 22/09/2012 9.06.27 | 0 |
| 22/09/2012 9.06.28 | 0 |
| 22/09/2012 9.06.44 | 0 |
| 22/09/2012 9.07.07 | 28 |
| 22/09/2012 9.07.36 | 77 |
| 22/09/2012 9.07.37 | 78 |
| 22/09/2012 9.07.38 | 78 |
| 22/09/2012 9.07.39 | 78 |
0-80 km/h in 53 secondi? Non mi pare verosimile, “a mente” ho contato meno di 10 secondi da 0 a 50 km/h!
Se davvero ci ho messo 53 secondi ad arrivare a 80 all’ora, devo averci messo 3 o 4 minuti per arrivare a 50 con l’Ingo!
Secondo log (GOVECS) (qui e’ proprio impazzito del tutto!!):
| 22/09/2012 9.18.07 | 0 |
| 22/09/2012 9.18.19 | 2 |
| 22/09/2012 9.18.23 | 0 |
| 22/09/2012 9.19.06 | 0 |
| 22/09/2012 9.19.24 | 23 |
| 22/09/2012 9.19.39 | 64 |
| 22/09/2012 9.19.40 | 64 |
| 22/09/2012 9.19.41 | 68 |
| 22/09/2012 9.19.42 | 68 |
Ecco invece il log dell’accelerazione massima dello Zem, fatta il giorno stesso:
| 9.31.40 | 0 |
| 9.31.43 | 2 |
| 9.31.47 | 30 |
| 9.31.51 | 41 |
| 9.31.52 | 41 |
| 9.31.53 | 43 |
| 9.31.54 | 45 |
| 9.31.55 | 45 |
| 9.31.56 | 47 |
| 9.31.57 | 47 |
| 9.31.58 | 49 |
| 9.31.59 | 48 |
| 9.32.00 | 51 |
| 9.32.01 | 50 |
| 9.32.02 | 51 |
| 9.32.03 | 51 |
| 9.32.04 | 52 |
| 9.32.05 | 53 |
| 9.32.06 | 55 |
| 9.32.07 | 58 |
Comunque, i numeri sono numeri, ma siccome un grafico vale più di un elenco di numeri, ecco cosa viene fuori confrontando le varie tabelle:

E’ bizzarro, la mia percezione era proprio l’opposta: molto più scatto nel govecs che nello zem. L’ho provato anche su una ripidissima rampa di un box, e se l’e’ cavata bene; certo andava pianino… ma la rampa era lunga 10 metri, non ho potuto verificare a quanto andasse. Comunque nel corso della prova o fatto parecchie salite con pendenze “tipiche” di Roma, più o meno ripide, e non ho mai notato affaticamenti o riduzioni dell’accelerazione. Una sensazione davvero piacevole, per chi viene da un cinese da 1500 W! 🙂
Passiamo alle altre caratteristiche dello scooter.
Ho fatto una foto alla targhetta delle specifiche del motore e a quella delle ruote:

Peccato che mi sono accorto solo ora che dietro c’e’ l’etichetta della batteria! Niente foto migliori di questa, purtroppo! 😦


Da queste interessanti etichette possiamo dedurre tutto questo:
Motore apparentemente della Parker Automation Italy (il logo coincide), ma in realtà della EMAC Automation; a pagina 15 di questo manuale si può vedere la lagenda dell’etichetta del motore:
- Codice d’ordine
- Voltaggio nominale
- Coppia nominale
- Potenza nominale
- Numero di serie
- Motor holding brake characteristics (optional): Voltage/current (boh?)
- Velocità nominale in forma di velocità angolare
- Corrente nominale
- Momento di inerzia
- Classe di protezione
- Classe di isolamento
Questo per quanto riguarda i dati tecnici.
Passiamo alle impressioni, in ordine sparso:
- Gli specchietti sono microscopici, tipo 5×5 centimetri, praticamente inutili.
- Le frecce sono completamente silenziose, neanche un vago accenno di BIP o TIC. Impossibile ricordarsi di spegnerle…
- Partenza molto graduale e confortevole
- Presa accendisigari sotto al manubrio
- Nessun portaoggetti, ma un gancio appendiborse
- Led per le frecce posteriori
- Vano sottosella molto piccolo, forse non c’entra nemmeno un casco jet; credo che lo scooter abbia 3 kWh di batterie al litio, eppure ha il sottosella pieno, il ponte tra i piedi, il “portaoggetti ” che in realtà è imbullonato… Forse prima tutti questi posti contenevano le ingombranti batterie al piombo, ma adesso?!?
- Freni molto potenti, entrambi a disco, nessuna vibrazione rilevata.
- Nessun rumoraccio di plastica nel passaggio sulle schifose strade romane bucherellate… che pero’ comunque si sentono abbastanza sul manubrio, mentre il sedile è molto morbido.
- Due modalità di guida, normale ed “economy”.
- Display digitale.
- Strano sistema di accensione: un pulsante sulla destra va prima spostato da posizione 0 posizoine 1 e poi rimsso in posizione 0, per poter partire. Mah.
- Molto maneggevole, almeno rispetto all’Emax 110S con identico telaio ma batterie al piombo.
- Ottimamente bilanciato sul cavalletto centrale, si tira già meglio del mio Zem da 85 kg!
- Le batterie vengono garantite 5 anni o 50’000 km… ma non c’e’ stato verso di sapere dalla commessa COSA è garantito: la percorrenza? quanta? il funzionamento? Non si sa, purtroppo sugli scooter elettrici la garanzia è ancora intesa… come per qualunque altro oggetto, che “o funziona o non funziona”, mentre le batterie hanno… 100 livelli di “funzionamento”, da 0 al 100%, e bisogna assolutamente capire COSA è garantito che una batteria debba poter fare dopo 50’000 km!
A suo tempo lo chiesi anche al venditore di Emax di via Belloni, ma anche lui non seppe dirmi niente.
Un vero mistero.
Concludo con qualche altra foto raccolta durante la prova:






Ecco un interessante confronto tra i frontali di Emax, Govecs e Italvel Day, in quest’ordine:


AGGIORNAMENTO
Ho trovato un modo alternativo per valutare l’accelerazione del Govecs invece del GPS del mio cell, che mi pare poco affidabile: i video su youtube!
Ho trovato video di vari scooter, quindi e’ possibile fare altri grafici, ma restando in argomento Govecs/Zem, ecco un comparativo:

I vaneggiamenti del mio GPS sono evidenti, così come sono evidenti le prestazioni molto migliori (e vorrei vedere!) del Govecs rispetto al “mio riferimento personale”, ovviamente lo Star 45.
Qui li vediamo meglio in un grafico dedicato:

Il video da cui ho estrapolato i dati:
Imparare dalle disgrazie altrui: l’alluvione di Genova del 4 novembre 2011
Essere coinvolti in una disgrazia è sempre, per definizione, una cosa brutta e sgradevole, così come lo è vedere altre persone, anche sconosciute, coinvolte in disgrazie.
Ma, come in ogni cosa, persino in una disgrazia ci può essere qualcosa, seppur piccolo, di positivo: in questo caso, la possibilità di imparare; imparare, dalle disgrazie altrui come comportarsi se in futuro si verrà coinvolti in un evento simile.
E in un mondo in cui il clima è impazzito, ed è ormai diventato normale stare 6 mesi senza pioggia per poi vederla arrivare tutta nello stesso giorno, è senz’altro utile imparare come comportarsi in caso di alluvione.
Per farlo, non c’e’ bisogno di vivere l’esperienza dell’alluvione in prima persona, ma, grazie ai potenti mezzi tecnologici disponibili oggi (telecamere ad alta definizione “racchiuse” in piccoli cellulari che teniamo in tasca, e banda larga che permette a chi li realizza di pubblicarli, e a chi vuole di vederli, senza dover aspettare un TG o un documentario), è possibile studiare il fenomeno da casa, all’asciutto, sul divano, e preparasi per il futuro.
Tre cose principali si notano nei vari filmati dell’alluvione di Genova:
1 – le persone sembrano non cogliere la gravità della situazione, tentando di continuare per la propria strada, in auto o a piedi.
2 – le persone, anche se si rendono conto del pericolo, sembrano non sapere come tirarsene fuori, e compiono azioni insensate.
Il primo caso si nota in filmati come questi: (la visione è consigliata ad un pubblico adulto)
– Onda di piena in Via Sardegna, a Genova
Al minuto 2:08 si vede una persona ostinatissima a voler continuare a tentare di raggiungere la sua destinazione, qualunque essa sia, pretendendo di vincere la corrente, piuttosto che assecondarla, salire sul cofano o sul tetto di una vettura, o aggrapparsi alle inferriate di una qualche finestra. (* – vedi alla fine, paragrafo “Il peso dell’acqua”)
Al minuto 2:38 si vedono invece due persone che si “rifugiano” tra le auto in sosta dopo aver tentato di attraversare la strada/fiume (* – la corrente): anche se probabilmente le auto sono in sosta su un luogo leggermente più in alto della sede stradale, è anche questa una pessima idea: i veicoli trasportati dall’acqua possono facilmente urtare quelli in sosta, ammucchiandoli e schiacciando le persone che si sono nascoste tra essi! Anche qui, l’unica azione sensata sarebbe stata salire sul cofano di un’auto, o quantomeno ripararsi dietro un albero piuttosto che un’auto, visto che un albero almeno è fissato al terreno (finchè regge), mentre un’auto è solo appoggiata per terra e le auto galleggiano, essendo perlopiù vuote e quindi più leggere dell’acqua (sì, benchè siano di metallo e vetro, benchè pesanti una tonnellata o più, le automobili galleggiano, proprio come le barche; eppure pesano).
In questo filmato si vede invece come il non sapere cosa fare causa il disastro: (la visione è consigliata ad un pubblico adulto)
http://www.youreporter.it/video_fereggiano_esonda
Il poveretto è rimasto intrappolato nella sua auto, ma purtroppo sceglie di fare la cosa peggiore: aprire lo sportello. Persino in caso di alluvione “statica”, cioè se ci si ritrova con l’auto in una pozza di acqua alta fino agli sportelli, o dentro un corso d’acqua o un lago, non bisogna aprire gli sportelli! (** v. paragrafo “il peso dell’acqua”). Ma aprire uno sportello e scendere dall’auto durante un’onda di piena, è una pessima idea:
1 – aprire lo sportello è faticossissimo a causa della spinta dell’acqua su di esso; la stessa spinta che agisce sullo sportello quando si scende dall’auto, rischiando così di essere stritolati (** v. paragrafo “il peso dell’acqua”) dallo sportello stesso!
2 – anche ammesso che si riesca a resistere alla pressione dello sportello, i piedi si troveranno subito immersi nella corrente, ossia tonnellate di acqua che scorre (** v. paragrafo “il peso dell’acqua”): niente di più facile che perdere l’equilibrio ed essere trascinati sotto l’automobile e non uscirne più.
3 – ma ammettiamo di riuscire persino a tenerci in piedi, oltre che a resistere alla pressione dello sportello. E poi? Appena si “esce” dallo sportello, esso non fa più da scudo, e si riceve addosso ulteriore acqua che ci trascinerà via: ciò che probabilmente è successo al poveretto del filmato.
Cosa fare, dunque, se travolti in auto da un’onda di piena?
Nell’ordine:
* restare in auto più tempo possibile, cioè fincè l’acqua resta al di sotto degli sportelli: le auto sono fatte per resistere a incidenti anche a 100km 50 km/h, sono cioè strutture rinforzate; l’abitacolo è espressamente progettato per non accartocciarsi, mentre il resto dell’auto invece si accartoccia per assorbire gli urti. Anche quando l’auto non è più guidabile perchè sollevata dall’acqua, offre un ottimo riparo dai detriti in arrivo.
* se l’acqua sta per arrivare al finestrino, è ora di scendere, altrimenti dopo non lo si potrà più fare! Ma non bisogna scendere aprendo lo sportello, bensì aprendo il finestrino: così lo sportello continuerà a proteggere dai detriti, e ancora un po’ dall’acqua. Quello che bisogna fare è uscire dal finestrino e salire sul tetto. Un’operazione difficilissima, data la scivolosità delle lamiere bagnate, e di certo impossibile per persone di una certa età; ma l’unica alternativa disponibile, per quanto detto finora.
* una volta sul tetto, cercare di saltare verso un luogo sicuro, anche saltando sui tetti di altre auto (si tratta di un’emergenza), ma preferibilmente saltando verso oggetti fissati a terra (alberi, lampi0ni, grate di finestre, ringhiere).
* mettersi a valle dell’oggetto a cui si sta aggrappati, in modo che possa riparare sia dalla corrente che dai detriti.
Mai cercare di vincere la corrente risalendola, nè di vincerla attraversandola: già 10 centimetri di acqua veloce sono difficilissimi da attraversare; 20 cm, 30 cm o più è semplicemente impensabile.
(*) Il peso dell’acqua
Ma perchè muoversi nell’acqua controcorrente è così difficile? Non è cemento, e al mare ci muoviamo in acqua abitualmente e facilmente.
Il problema è che in quel caso l’acqua è ferma. Ciò che rende tragica un’alluvione è il movimento dell’acqua, che mette in gioco la sua inerzia, un “qualcosa” che dipende, oltre che dalla sua massa, dalla sua velocità.
Purtroppo non è facile farsi un’idea di quant’è la massa della pioggia, quindi facciamo qualche calcolo:
La pioggia si misura in millimetri, mm; 1mm di pioggia su una superficie di 1 metro quadro significa un volume di 1 x 1000 x 1000 mm, cioè 1.000.000 mm^3, ossia 1 dm^3: in altre parole, 1 mm di pioggia equivale a 1 litro d’acqua per metro quadrato.
Quindi, se cadono 10mm di pioggia, vuol dire che in 1 m^2 ci sono 10 litri d’acqua. Ma quanto sono “10 litri d’acqua”? Semplice: una cassa di bottiglie. Una bottiglia d’acqua è in genere da 1,5 litri, in una cassa ce ne sono 6, quindi in tutto 9 litri.
10 mm di pioggia equivalgono a una cassa d’acqua versata su 1 m^2 di superficie, per un totale di 10 chili di peso. Ma 10 mm d’acqua sono pochissima cosa, sono solo 1 centimetro d’acqua, non si può certo chiamare “alluvione”.
A Genova il 4 novembre 2011 sono caduti fino a 500 (cinquecento) millimetri di pioggia: facendo i conti, significa cinquanta casse d’acqua per metro quadro, o anche cinquecento chili d’acqua per metro quadro. Parliamo di mezza tonnellata di acqua, perdipiù in movimento: nessuna persona può resistere a mezza tonnellata di acqua che gli si riversa contro: mezza tonnellata è il peso di una Smart!!!
(**) La corrente
Per questo non ha senso pretendere di risalire la corrente, o anche solo di attraversarla: un “torrente urbano” profondo 20 centimetri trasporta intorno alle nostre gambe 200 chili d’acqua, o se preferite 20 casse d’acqua, ogni secondo (***) : non c’e’ verso di rimanere in piedi a lungo.
(***) Se la corrente è molto lenta e si sposta a solo 1 m/s , cioè 3 km/h.
Domanda polemica: tutte queste cose non si potrebbero semplicemente insegnare già dalle scuole elementari a persone che vivono in ambienti notoriamente soggetti ad alluvioni periodiche?
Aggiornamento:
Sempre in tema di imparare dalle disgrazie: proprio in questi giorni, leggendo di Genova, ho scoperto dell’esistenza dei P.A.I., Piani di Assetto Idrogeologico: un documento che esiste, in teoria, per ogni comune d’Italia, e che consiste in mappe dettagliatissime delle zone sensibili ad alluvioni, frane, smottamenti, inondazioni, allagamenti….
Per il bacino del Po, interessato in queste ore:
Per la Liguria:

{kind=link}
{kind=link}
leave a comment