Appunti su smartwatch opensource programmabili

Ne esistono diversi, con prezzi che variano dai 30 agli 80 euro, tondi o rettangolari, alcuni progammabili in python, altri in javascript, altri nel classico C.
- Pine 64 “PineTime”
- SQFMI “Watchy” (ESP32, wifi+BT) (home page)
- Bangle.js 1.0, 2.0, 2.1 (70-80 euro) – 1.0: tondo; 2.x: rettangolare (javascript)
- Lylygo “TTGO T-Watch-2020-V3” rettangolare (ESP32) (30-40 euro) (Arduino, IDF, Micropython) (IR sensor) (homepage)
- OpenSmartWatch (40 euro) (home page)
Adattatore jack audio per telefono fisso Alcatel-Lucent 8029
Il telefono Alcatel-Lucent 8029 dispone di una presa audio per la connessione di una cuffia, che però ha un pinout molto particolare, col quale non funziona nessuna delle cuffie, con o senza microfono, che ho provato; dopo lunghe ricerche e numerosi test, alla fine ho scoperto che ha lo stesso pinout della antica XBOX 360.
Di jack audio esiste una molteplice varietà, a partire dal numero di contatti; si parla di tipo “TS”, “TRS”, o “TRRS”:
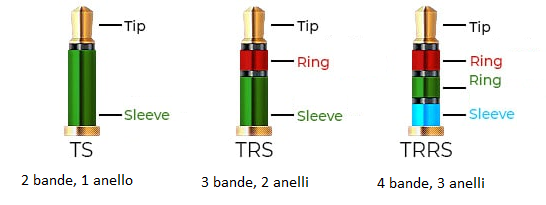
Il suddetto telefono ha un connettore TRS a 3 contatti, mappato in questo modo:

Esistono in commercio adattatori che permettono di collegare a questo tipo di jack una cuffia con connettori sdoppiati:


La XBOX aveva però un connettore da 2.5mm, mentre il telefono alcatel ha un connettore da 3.5mm, quindi serve un ulteriore adattatore: da 3.5mm maschio a 2.5 mm femmina:


Non ha importanza se è a 3 o 4 pin: tecnicamente dovrebbe essere da 3, ma anche usando quello da 4, i due anelli più vicini al filo vengono automaticamente cortocircuitati dall’adattatore XBOX.
Esiste una molteplicità di connettori/sdoppiatori, con vari “sessi” e varie mappature:
- doppio maschio a singola femmina: su un maschio c’è il microfono, sull’altro c’è la cuffia, la femmina unisce entrambi; i due maschi vanno a PC (in genere fissi) con jack cuffia/mic separati, la femmina va ad auricolare per cellulari, che ha jack singolo

- doppia femmina a singolo maschio:
- tipo 1: stereo splitter, con due femmine che portano entrambe il segnale stereo proveniente dal jack maschio a 3 pin; serve a permettere a due persone di ascoltare la stessa sorgente usando due cuffie separate; si riconosce perchè sui jack femmina non sono riportati i due simboli di microfono e altoparlante, e il jack maschio ha solo 3 pin
- tipo 1: stereo splitter, con due femmine che portano entrambe il segnale stereo proveniente dal jack maschio a 3 pin; serve a permettere a due persone di ascoltare la stessa sorgente usando due cuffie separate; si riconosce perchè sui jack femmina non sono riportati i due simboli di microfono e altoparlante, e il jack maschio ha solo 3 pin

- tipo 2: mic/headset splitter, con una femmina che supporta l’inserimento di una cuffia e l’altra che supporta l’inserimento del microfono; si riconoscono per i simboli di microfono e cuffie sulle due femmine, e il jack maschio ha 4 pin: questo cavo può essere usato solo sui PC che hanno questo simbolo sul jack, rappresentante una cuffia con microfono integrato;


sembra che il nome di questi adattatori con maschio a 4 pin sia Y-05, o PCV-05 (se della Sennheiser), o altro, comunque con “-05” alla fine; il PCV-05 viene dichiarato “compatibile Mac e Iphone”.
Esiste però anche una variante “PCV-07”, esteriormente apparentemente uguale, a parte i colori; questo viene dichiarato “compatibile Mac e PS4”:

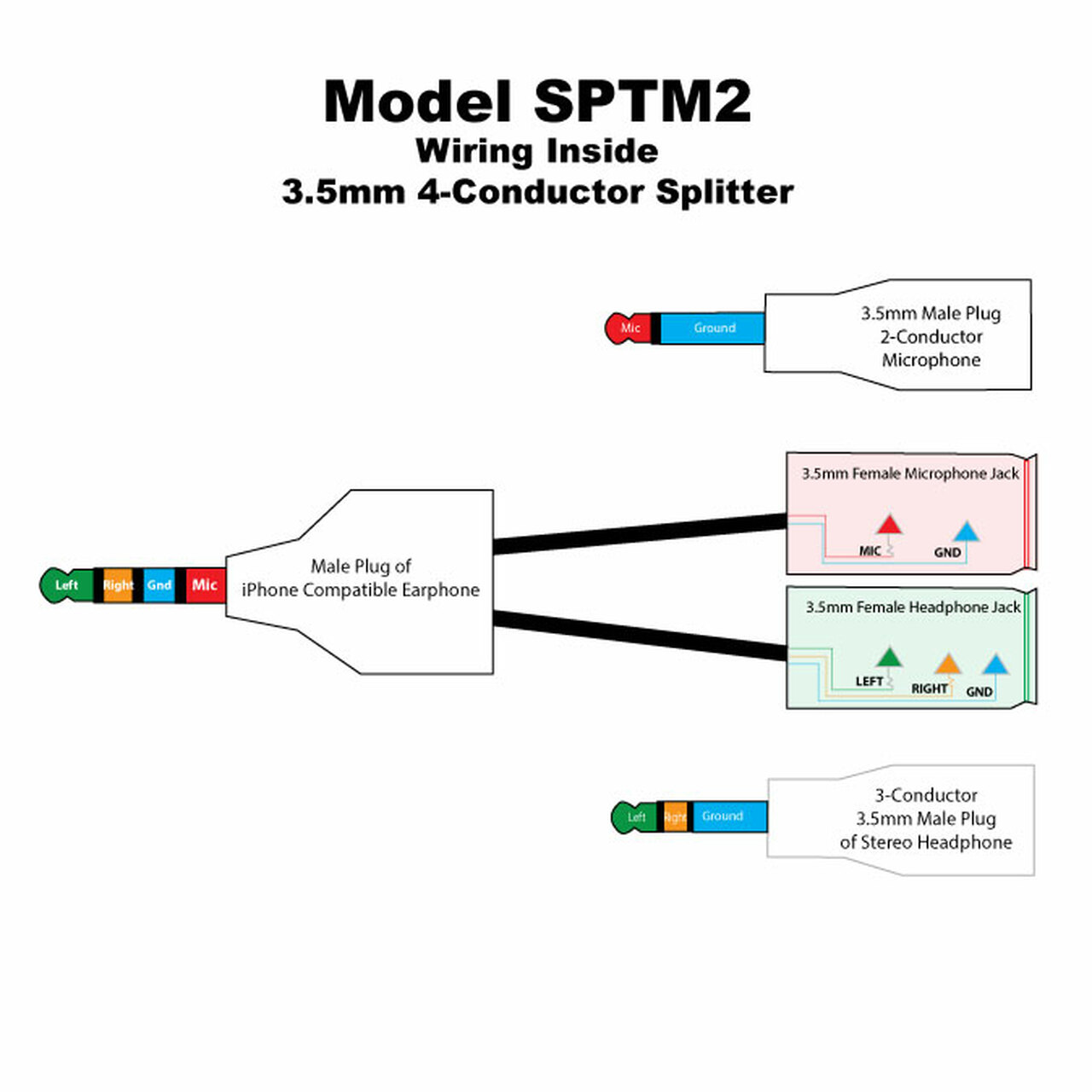
Esistono anche gli adattatori compatti SPTM1 (Sleeve = Ground) e SPTM2 (Sleeve = Mic), di cui il produttore fornisce anche lo schema/pinout:

Anche il produttore Galamino fornisce il pinout per il suo adattatore PMP35: è di tipo CTIA, cioè con microfono sullo sleeve:
Sembra però che alcuni connettori per PC col simbolo della cuffia microfonata in realtà consentano solo la connessione alternativa di cuffie oppure microfono, ma è da verificare; secondo questa teoria, inoltre, sul Ring ci sarebbero 5V necessari ad alimentare il microfono.
I connettori a 4pin/3anelli hanno la particolarità di avere due mappature possibili, diverse e incompatibili tra loro: il CTIA, con microfono sullo Sleeve, e l’OMTP, con massa sullo Sleeve:

Lo standard CTIA (microfono su sleeve) dovrebbe essere quello in uso nei notebook (PC portatili).
Le specifiche ufficiali android (femmina su cell, maschio su cuffia) indicano di usare queste resistenze tra i vari contatti per implementare i comandi a pulsante:

Sul notebook della HP “Elitebook” è presente una singola porta audio marcata come “combo”, a cui riesce difficile far riconoscere un microfono esterno: al momento ci sono riuscito solo inserendoci un vecchio adattatore Nokia AD-43, il cui pinout per ora è sconosciuto.

L’adattatore può funzionare sia da solo, come microfono, sia aggiungendoci un auricolare Nokia HS-45; il PC però non riconosce l’auricolare, per cui per poter usare microfono esterno e cuffia contemporaneamente, al momento l’unico metodo che ho trovato è connettere il suddetto AD-43 al jack combo, e il jack audio di una cuffia audio+mic alla porta Line In della docking station a cui collego il PC… Il problma però è che funziona per pochi secondi, poi, anche se continua ad essere rilevato nella finestra di configurazione audio, il PC non registra nessun segnale dal microfono.
L’AD-43, che funzionava ad esempio col Nokia N-95, è dotato di ben 7 tasti:
1 – Riaggancia
2 – play/pause
3 – avanti
4 – indietro
5 – volume su
6 – volume giu
7 – ?
E’ presente anche un piccolo switch che serve presumibilmente a cambiare la modalità di funzionamento.
Il NOKIA N95 aveva questo pinout:

COVID-19 – Misurare temperatura corporea con accuratezza di +/-0.1°C – Puntata 3
Per il “progetto termometro“, oltre ai già visti sensori “normali”, ne ho trovati altri che funzionano senza dover stare attaccati al corpo (“sensori a infrarossi senza contatto”), probabilmente usati nei termometri “a pistola”.
Potrebbero essere un’alternativa o un complemento ai sensori a contatto, viato che dalle prove che ho ftatto tenendo il sensore al polso, risulta che non supera mai i 35.0, raggiungendo spesso solo i 34.5, cosa che probabilmente è dovuta a questo:


Evidentemente c’è un motivo se i termometri vanno messi in bocca o sotto l’ascella…
Però mettendo un sensore remoto al polso sarebbe comunque possibile misurarsi la temperatura al volo, e creare comunque un log di tutte le misurazioni effettuate. Oppure si potrebbe aggiungere genericamente 1.0°-1.5°C alla misurazione effettuata sul polso, anche se la cosa sarebbe molto empirica.
- Progetto completo n.1 di termometro a infrarossi a pistola basato su MLX90614
- Progetto completo n.2 di termometro a infrarossi a pistola basato su MLX90614
- Progetto completo n.3 di termometro a infrarossi a pistola basato su MLX90614
Sensori senza contatto

-
- Accuratezza: +/-0.3°C ?
- Acquisto: https://www.robot-italy.com/, 13,00 euro
- Datasheet
- IrThermo 2 click (TMP007)
- Mikroe, 20,00$
Varianti di MLX90614 (+/-0.5°C)
- GY906-BCC MLX90614ESF-BCC

- +/-0.5°C
- Amazon, 22,00 euro (no Prime)
- Datasheet MLX90614
- Myriad Choices MLX90614

- +/-0.5°C
- Amazon, 21,00 euro (no prime)
- Datasheet MLX90614
- NCIR – specificamente progettato per M5StickC


Varianti di MLX90615 (+/-0.2°C)

- GY-MCU90615V2 (MLX90615)

- BouBou Gy-90615 Mlx90615, 17,00 euro
- BliliDIY Gy-90615 Mlx90615, 21,00 euro
- MLX90615, 9,31 euro

- MIKROE-2677 basata su AK9750 (analogico), +/- 5.0°C ?!?
- MIKROE-3121 basata su MLX90632, +/-1°C, 32,00 euro
- IRTHERMO 3 CLICK basata su MLX90632, +/-1°C, 24,00 euro
- MLX90632
- +/- 0.02???
- Sparkfun discontinued
- Datasheet
Termocamere
- SparkFun IR Array Breakout – 110 Degree FOV, MLX90640 (Qwiic) – 82,00 euro
- MIKROE-2539 basata su AMG8853 , 71,00 euro : +/-3°C
- MIKROE-3607 basata su AK9754, 24,00 euro
- Panasonic GridEye – +/-2.5°C
- 101020062 di Seeedstudio basato su OTP-538U (analogico) – datasheet
- Ricerca parametrica su Mouser.it
- Ricerca parametricasu Digikey
Sensori a contatto
Definiti “remoti” ma solo perchè leggono sensori remoti A FILO; sono inoltre a bassa acuratezza (+/-1°C):
Microchip (datasheet):
- EMC1812
- EMC1813
- EMC1814
- EMC1815
- EMC1833
Board per leggere i suddetti sensori: MIKROE-3685
Board MIKROE-3636
- Basata su ADT7420
- +/- 0.25°C
- A contatto
- 19,00 euro su TME.eu
- 20,00 euro su Digikey
- Board analoga (EVAL-ADT7420-PMDZ) a 6,00 euro su Mouser ()
MIKROE-3600
COVID-19 – Misurare temperatura corporea con accuratezza di +/-0.1°C – puntata 2
— IN AGGIORNAMENTO — PROGETTO IN CORSO —
E’ arrivato l’ultimo componente hardware necessario per il progetto: il ClosedCube breakout SHT35-D. Datasheet.
Quello che serve adesso per realizzare il progetto completo è:
Hardware
- nuovo supporto stampato in 3d per il cinturino
- ne ho stampato uno provvisorio tanto per provare, e funziona, ma non avendo tra le mani la schedina SHT35 non potevo progettare quello definitivo, che contiene sia l’m5stickC che il sensore
FATTO; da mettere online il file 3d –>è sbagliato perchè l’ho predisposto per avere i pin dell’SHT sul lato dell’m5stickC col connettore lungo, ma i pin SDA/SCL sono sul connettore GROVE!- testare fissaggio del cinturino con perni in fil di ferro
- connessione hardware tra sensore e m5stickC
- i pin SDA e SCL liberi sono G32(SDA) e G33(SCL) sulla porta GROVE:

24/5/2020: FATTO. Connessione effettuata, sketch di prova funziona: vedo valori di temperatura e umidità sulla seriale; però ho dovuto cambiare da 0x44 a 0x45 l’indirizzo I2C del sorgente di esempio.
In compenso non vengono mostrati correttamente i valori float sul display, nonostante la copiatura dall’esempio “TFT_Float_Test.ino”
-
- Esiste comunuque una libreria che permette di usare come pin I2C qualunque coppia di pin
- L’alimentazione dell’SHT35 può essere sia 3.3V che 5V (max 5.5V), e la Vout della porta GROVE è 5V.
- Altri pin utili:
ESP32 GPIO10 GPIO9 GPIO37 GPIO39 RED LED LED pin IR transmitter Transmitter pin BUTTON A Button pin BUTTON B Button pin - isolamento elettrico dei contatti del sensore dal sudore della pelle
- verificare presenza di cicalino a bordo per allarme acustico in caso di temperatura pericolosa –> no, serve esterno
Software
Il software dovrà avere una serie di componenti, alcuni accessori, altri indispensabili; ovviamente non reinventerò la ruota ma andrò scopiazzando di qua e di là cosa c’è di disponibile. Chiaramente la prima cosa da fare è visualizzare la temperatura, anche senza ora attuale; il resto verrà dopo.
- scansione dispositivi I2C (anche le periferiche di bordo sono su I2C, su pin vari) LINK
- lettura e visualizzazione dati sensore SHT35
- c’è una libreria specifica ClosedCube e una Adafruit, verificare
- pare che nella libresria ClosedCube esista un modo per leggere la temperatura “periodicamente”, verificare se consuma di meno –> è una caratteristica del sensore, ma consuma 30 volte più corrente della lettura singola (70 uA invece che 2 uA)
- Nella libreria ClosedCube il risultato della lettura del sensore tramite le varie funzioni possibili è di questo tipo:
struct SHT31D {
float t;
float rh;
SHT31D_ErrorCode error;
};
Quindi bisogna:- Definire la variabile:
- SHT31D risultato;
- Assegnare alla variabile il valore della lettura effettuato tramite una delle 3 funzioni:
- readTempAndHumidity(repeatability, mode, timeout);
- E’ la più generica: permette di scegliere una delle altre due in base al parametro “mode”.
- readTempAndHumidityClockStretch(repeatability);
- readTempAndHumidityPolling(repeatability, timeout);
- readTempAndHumidity(repeatability, mode, timeout);
- Non sono riuscito a trovare nessuna info in merito alla differenza dei due metodi, quindi userei quello più semplice, con singolo parametro, tenendo in considerazione l’unica cosa che ho capito: più è basso il valore di repeatability, minori son i consumi; e noi dobbiamo tenere i consumi al minimo per prolungare la durata della batteria. Useremo quindi la funzione 2, con parametro pari alla costante SHT3XD_REPEATABILITY_LOW.
- Utilizzare di temperatura contenuto nella variabile-risultato:
- risultato.t
- Definire la variabile:
- impostazione ora attuale
- ho scoperto che è possibile impostare l’ora del PC sull’ESP32 al momento del caricamento dello sketch; questa riga memorizza in una variabile data e ora attuale:
const char compile_date[] = __DATE__ ” ” __TIME__;
risultato: May 22 2020 16:55:46 –> verificare configurabilità formato - l’orario andrà in qualche modo memorizzato nell’RTC di bordo
- l’istruzione setTime(8,29,0,1,1,11) è valida solo per Arduino/AVR o anche per ESP32/M5stickC?
- ho trovato diversi sorgenti, sia per orologi digitali che analogici; molti si basano su millis(), ma sarebbe meglio basarsi sull’RTC incorporato; pare che abbia una pessima precisione (5%, quindi un minuto perso ogni 3 ore!) se basato su riferimento interno, ma ottima se basato su un cristallo “esterno”: da verificare quanto/come “esterno. Discussione, discussione
- esempio ufficiale RTC su M5stickC
- si può usare server NTP er impostare l’ora; ci sono vari sorgenti, ma bisogna prima riuscire a collegarsi al WiFi! E al momento il mio m5stickC non si collega… Impostare oratio NTP con una riga singola: configTime(0, 0, “pool.ntp.org“);
- ho scoperto che è possibile impostare l’ora del PC sull’ESP32 al momento del caricamento dello sketch; questa riga memorizza in una variabile data e ora attuale:
- visualizzazione ora/data: FATTO
- visualizzazione livello batteria
- sorgente trovato, da implementare
- impostazione deepsleep: la batteria deve durare almeno 24 ore, chissà se è possibile.
- verificare i consumi in deepsleep dell’m5stickC –> 10uA (solo RTC e RTC memory); è presente anche un ULP (Ultra Low Power) processor, che consuma appena 100 uA o 150 uA durante il deepsleep, secondo come viene impostato, ma va programmato separatamente dallo sketch principale.
- verificare i consumi in deepsleep dell’SHT35 –> 2 uA in attesa, 1500uA in misurazione, durata da 4ms a 15ms a seconda della ripetibilità impostata
- Considerando i dati sopra, con un consumo di 12uA e una batteria da 80.000 uAh si avrebbe un’autonomia teorica di 6666 ore. Ovviamente però ogni tanto il dispositivo si accende, vuoi per leggere i valori e salvarli, vuoi perchè consultato dall’utente, quindi i consumi reali sono da valutare. Poichè l’M5stickC è dotato di appositi comandi per leggere la quantità di corrente assorbita in un dato momento grazie al power manager di bordo AXP192, volendo è possibile salvare questi dati durante l’utilizzo e fare una stima dell’autonomia reale possibile.
- logging dei dati in memoria FLASH tramite SPIFFS; esempio1
- visualizzazione grafico temperatura delle ultime X ore direttamente sul display; bisogna tracciare gli ultimi “n” valori; il display è 80×160. la temperatura può oscillare tra 36.0 e 38.0, quindi basterebbe una striscia alta 20 pixel. drawPixel(int16_t x, int16_t y, [uint16_t color]);
- visualizzazione alert visivo in caso di temperatura pericolosa: usare immagini in formato XBM (BMP monocromatiche in formato testuale/esadecimale)
COVID-19 – Misurare temperatura corporea con accuratezza di +/-0.1°C
Ai tempi del COVID-19, per molte settimane – e speriamo non mesi – ci verrà misurata la temperatura in continuazione: andando a lavoro, entrando nei locali, andando dal barbiere; per ora infatti è l’unico modo istantaneo per verificare, anche se molto a grandi linee, se si è infetti o no.
Potrebbe allora essere comodo potersi misurare da sè la temperatura corporea, senza dover stare ogni volta 5 minuti col termometro sotto l’ascella, o senza spendere 50 euro per un termometro a infrarossi; senza contare che sarebbe molto utile poter avere un grafico dell’andamento della temperatura nella giornata.
Stanno iniziando a comparire sul mercato i primi braccialetti fitness o smartwatch con termometro incorporato, ma per ora solo in spedizione dalla Cina, e comunque nessuno fornisce il grado di accuratezza della misurazione (tranne questo, che dichiara 0.1°C); e considerando, ad esempio, che per esempio che il termometro di una tipica stazione meteo ha un’accuratezza dichiarata di +/-2°C, significa che se usassimo quel termometro per misurarci la febbre, e avessimo 37.5°, quel termometro potrebbe dire un qualunque valore fra 35.5° (in ipotermia) o 39.5° (con le pezze in fronte)…

Serve quindi una misurazione molto più precisa, con uno scarto di pochi decimi di grado.
Ecco allora un elenco di alcuni sensori di temperatura ad alta accuratezza: anche se, usandoli per il fai-da-te, non possono essere usati come presidio medico per decidere se e come curarsi, possono comunque dare un valido indizio per decidere se poi farsi una misurazione seria con uno strumento certificato.
Ecco dunque la lista:
- SHT35: +/-0.1°C (Sensirion) (temperatura/umidità)
- STS35: +/-0.1°C (Sensirion) (solo temperatura)
- SHT85: +/-0.1°C (Sensirion) (temperatura/umidità)
- Si7051: +/-0.1°C (Silicon Labs)
- MAX30205: +/-0.1°C (Maxim Integrated)
- MAX30208: +/-0.1°C (Maxim Integrated)
- MCP9808: +/-0.1°C (Microchip) (solo temperatura)
Altri meno accurati:
- MAX31855: +/-0.1°C (Maxim Integrated) (non I2C)
- HDC1010: +/-0.2°C (Texas instruments)
- HDC1080: +/-0.2°C (Texas instruments)
- HDC2080: +/- 0.2°C (Texas instruments)
- SHT30: +/-0.2°C (Sensirion)
- SHT31: +/-0.2°C (Sensirion)
- SHTC3: +/-0.2°C (Sensirion)
- HTU21D – +/- 0.3°C (TE Connectivity)
- AHT15 – +/- 0.3°C (ASAIR)
- SHTC1: +/- 0.3°C (Sensirion)
- Si7013: +/-0.4°C (Silicon Labs)
- Si7020: +/-0.4°C (Silicon Labs)
- Si7021: +/-0.5°C (Silicon Labs)
- AM2320: +/- 0.5°C (Aosong )
- BME680: +/- 0.5°C
- DHT12: +/-0.5°C
- BME280: +/- 1.0°C
- LMT70: analogico
- Altri: https://wiki.liutyi.info/display/ARDUINO/Sensors
Sono tutti sensori davvero minuscoli, grandi quanto l’unghia del mignolo, quindi impossibili da gestire con un saldatore classico: servirebbe un fornetto per saldature SMD. Per fortuna però per molti esistono delle versioni già saldate su breadboard; alcune sono molto rare e disponibili solo in ordine dalla cina, ma altre sono piuttosto diffuse e si trovano su ebay Italia o addirittura su Amazon, alcuni persino con spedizione gratuita con Prime da un giorno all’altro.

E’ importante quindi saper distinguere quale è il migliore. I dati di accuratezza sono espressi come un singolo numero, ma un modo più preciso per definire l’accuratezza è un grafico; nei datasheet di questi oggetti sono presenti grafici come questo, che indicano quant’è il massimo possibile errore di misurazione (asse Y, a sinistra) alle varie temperature (asse X, in basso):

Questo grafico dice ad esempio che per questo specifico componenbte “tipicamente”, per misurazioni tra +20°C e +60°C, lo scarto tra temperatura misurata e reale è di 0.1°C, mentre quello “massimo” è di 0.3°C.
Prendendo i grafici di tutti i vari sensori e raggruppandoli tutti in un’unica figura, ho ottenuto quanto segue:

Si nota chiaramente come tutti i sensori siano più accurati nella zona di interesse, che è quella della temperatura del corpo umano, la quale può variare fra 35 e 43 gradi, dove ovviamente i valori estremi si hanno solo in caso di gravissima malattia: la temperatura tipica di un essere umano in salute è infatti di circa 37°C. “Circa” perchè la temperatura può variare per vari motivi:
In base al punto di misurazione:
In base al momento della misurazione:

Persino in base all’umore:

Questa tabella indica alcune temperature di riferimento, da cui si evince perchè bisogna allertarsi, in tempi di pandemia mondiale da coronavirus, se la temperatura sale sopra i 37.5°C:

Scelta del sensore
Qual è il sensore migliore tra quelli elencati prima?
Ovviamente quello che ha deviazione/errore più basso in prossimità dei 37 gradi, quindi quelli della prima lista, con accuratezza di 0.1°C; poi però bisogna trovare:
- quello più facilmente reperibile in Italia
- il meno costoso
- quello più pratico
Per il punto 1: scartiamo quindi quelli su Aliexpress e simili, che probabilmente, ordinati a maggio 2020, arriverebbero dopo che sarà stato inventato il vaccino… Orientiamoci quindi su siti italiani, su Ebay con spedizione dall’Europa, e su Amazon.
Per il punto 2: se c’è su Amazon, vediamo se è disponibile con spedizione gratuita.
Per il punto 3: verifichiamo se ci sono già librerie disponibili per Arduino, o addirittura kit di test già pronti.
Per quanto riguarda Amazon Prime, la scelta è molto limitata: ci sono solo SHT35 e Si7051. Su Ebay la scelta è un po’ più ampia: SHT35, SHT85, Si7051, MAX30205.

Per quanto riguarda le librerie Arduino, ce ne sono per i Sensirion SHT3x e per i Silicon Labs Si7051 dalla Adafruit (o anche per i Silicon Labs Si7013, Si7020 e Si7021, che però hanno accuratezza troppo bassa (+/-0.5°C)).
Schede preassemblate
SHT31 Smart Gadget
Il Sensirion SHT35 ha un punto a suo favore in più: esiste un modulo già assemblato dotato di batteria tampone, circuito di lettura del sensore e schermo LCD, cose che altrimenti dovremmo aggiungere noi a mano, assemblare e testare: si chiama SHT31 Smart Gadget:


Clicca qui per una foto a risoluzione esagerata: link
Lo Smart Gadget è disponibile su:
- RS-Components a 23,00 euro iva inclusa.
- Digikey a 24,00 euro iva inclusa
Come è facile intuire dal nome, non è basato sull’SHT35 da +/-0.1°C ma sull’SHT31 da +/-0.2°C: ci si può accontentare di 0.2, oppure si può pensare di sostituire il sensore SHT31 con un altro: la scheda infatti espone i 4 pin a cui è collegato il sensore tramite protocollo I2C (Vcc, GND, SDA, SCL), che quindi può essere staccato e facilmente sostituito, a livello di hardware; per quanto riguarda la compatibilità SW, dal momento che le librerie arduino sono dichiarate come compatibili per tutti i modelli SHT3x, è ipotizzabile che anche questa scheda già pronta sia compatibile con tutti gli SHT3x. Naturalmente per esserne sicuri al 100%, anche qui bisognerebbe leggere in dettaglio nel datasheet i registri e i protocolli.
Importante anche l’indirizzo I2C assegnato: per certe board che montano SHT31 può essere impostato su 0x44 (default) o 0x45 a seconda di come è connesso il pin ADR (ADDRESS). Altre board hanno indirizzo fisso non modificabile, quindi non sono adatte:
Sullo smart gadget l’SHT31 ha il pin ADDR collegato all’alimentazione, quindi, da datasheet, l‘indirizzo è impostato su 0x45.
Lo Smart gadget è dotato di memoria onboard e capacità di logging, e sono disponibili due app della Sensirion stessa per scaricare i dati e mostrarli sul cellulare Android o iOS (qui l’app Android precedente e ormai abbandonata).
Il sensore esterno SHT35 si trova già montato su basetta con connettore GROVE, preimpostata su indirizzo 0x45, quindi direttamente collegabile al gadget.
L’immagine che segue mostra il retro di una schedaGrove SHT35, evidenziando le piazzole utilizzabili per modificare l’indirizzo dal default 0x45 a 0x44:

Affinchè una scheda SHT35 funzioni su uno Smart Gadget SHT31, deve essere impostata sullo stesso indirizzo che l’SHT31 ha sulla scheda (0x45); in caso di errore non si rompe niente, ma il sensore non verrà visto dalla scheda.
E’ disponibile, tra parentesi, anche una libreria Arduino per il sensore STS35, sempre della Sensirion, sempre da +/-0.1°C, ma solo sensore di temperatura (mentre l’SHT35 contiene anche un sensore di umidità ambientale, in realtà inutile per la nostra applicazione).
Sempre su RS è disponibile anche una board in formato “Grove” contenente il sensore SHT35 (disponibile da giugno) a 15,00 euro o su robot-domestici a 26,00 euro.
Questo è il manuale dello Smart Gadget, questa la pagina ufficiale
Esaminando i file gerber dello SmartGadget, è spossibile individuare come e a cosa sono connessi i vari pin, e scoprire che dal lato opposto della batteria c’è proprio una predisposizione per collegare un sensore esterno:


Basta quindi tagliare le piste di rame vicino al sensore, saldare il nuovo sensore alle piazzole libere, e ottenere quindi (in teoria) uno Smart gadget con accuratezza di +/-0.1°C anzichè 0.3°C; la rimozione dell’SHT31 è in ogni caso necessaria perchè è montato dalla parte del display, mentre è necessario che sia attaccato al polso per leggere correttamente la temperatura, ma una volta rimosso potrebbe risultare difficile, se non impossibile, risaldare i fili ai vicinissimi terminali del sensore, o ai forellini sul PCB per cui passano le piste di rame.
Scheda M5stickC
Una possibile alternativa quasi-già-pronta, essendo disponibili le librerie arduino, è l’utilizzo di una board M5StickC (da non confondere con M5Stack):

Anche se non dispone di un sensore di temperatura integrato, questo dispositivo è dotato di:
- Microcontrollore ESP32 dualcore a 240 MHz con 4 Mbyte di RAM
- Bluetooth
- Wifi
- Schermo OLED
- Connettore GROVE (adatto per sensore esterno Grove SHT35)
- Pulsanti
- Accelerometro
- Giroscopio
- Trasmettitore IR
- Segnalatore acustico
- Predisposizione per attacco a cinturino
- Batteria da 95 mAh
- Connettore USB
La quantità di progetti realizzabili con un simile dispositivo è enorme, per cui, una volta terminata la necessità di misurarsi la temperatura tutto il giorno, può essere riciclato per altri usi.
E’ disponibile su Amazon Prime (B07QRQ4MP8) a 25 euro inclusivo di cinturino:
Naturalmente in questo caso il SW sarà tutto da scrivere, ma essendo l’ESP32 programmabile tramite Arduino, si tratta solo di usare le già citate librerie Arduino adatte per il proprio sensore e trovare un sorgente di esempio da cui partire.
Per quanto riguarda il cinturino, se si possiede già un M5tickC senza cinturino, o si vuole comprarlo senza per risparmare, usando un vecchio cinturino, qui c’è il modello 3d dell’involucro dell’M5stickC, su cui lavorare per crearsi manualmente l’aggancio in plastica per il cinturino:
Fai da te: Arduino/ESP8266/ESP32
Librerie
- Sensirion SHT3x di Sensirion (accuratezza 0.1°C)
- Silicon Labs Si7051 di Adafruit (accuratezza 0.1°C)
- Microchip MCP9808
- Sensirion SHT31 di Adafruit
- Silicon Labs Si7013, Si7020 e Si7021 di Adafruit (accuratezza 0.3°C)
Sorgenti di esempio:
Questo sorgente di esempio si limita a stampare la temperatura sul monitor seriale; chiaramente l’applicativo finale dovrà invece stamparlo su un display:
#include <Arduino.h>
#include <Wire.h>
#include "Adafruit_SHT31.h"
Adafruit_SHT31 sht31 = Adafruit_SHT31();
void setup() {
Serial.begin(9600);
if (! sht31.begin(0x44)) { // Qui c'è l'indirizzo I2C del sensore; per alcuni è fisso a 0x40, per altri si può modificare tra 0x44 e 0x45
Serial.println("*ERR01* Sensore non presente a indirizzo 0x44");
while (1) delay(1);
}
}
void loop() {
float t = sht31.readTemperature();
if (! isnan(t)) {
Serial.print("Temp *C = "); Serial.println(t);
} else {
Serial.println("*ERR02* Lettura errata");
}
Serial.println();
delay(1000);
}
- ESP32 con SHT31
- M5stickC come orologio
- Arduino con SHT35
- Arduino Si7051
- Libreria ESP32/arduino per logging in memoria flash di bordo (o, volendo, anche su SD CARD esterna)
- Stazione meteo con sensore esterno DHT11
- Timer/Ticker
Sensori su breadboard
- Si7051 su indirizzo 0x40 non modificabile – 20,00 euro – Amazon Prime
- STS35 su indirizzo 0x4A o 0x4B – 22 euro+sped – Amazon UK
- STS35 su indirizzo 0x4A o 0x4B – 27 euro+sped – Ebay UK
- MCP9808 su indirizzo compreso tra 0x18 e 0x1F – 5 pezzi a 3,00 euro l’uno – Amazon prime
- MCP9808 su scheda GROVE – indirizzi tra 0x18 e 0x1F – 5,00 euro – RS-Components (info su seedstudio; dettagli su indirizzi, altro link, tab. 3.2)
- MCP9808 “Thermo 8 Click MikroElektronika” della MikroE, indirizzi tra 0x18 e 0x1F – 9,00 euro – RS-Components
Per SmartGadget (serve indirizzo 0x45):
- SHT35 su indirizzo 0x44 o 0x45 – 22,00 euro + 5,00 spedizione – Ebay UK
- SHT35 su indirizzo 0x44 o 0x45 – 32,00 euro, iva e spedizione inclusa – Da Germania in 3 giorni
- SHT35 su indirizzo 0x44 o 0x45 – 27,00 euro, spedizione inclusa – Amazon (non Prime)
- SHT35 su indirizzo 0x44 o 0x45 – 27,00 euro, +spedizione – Robot-domestici.it
Appunti su programmazione ATTINY85 su piattaforma Digistump Digispark
L’attiny85 è un minuscolo microcontrollore con soli 6 pin con una minuscola memoria di 8 KB e una frequenza di lavoro di 16MHz, ma per alcuni progetti può benissimo sostituire una ben più costosa e ingombrante Arduino o Raspberry; per esempio per leggere semplicemente i valori di un dispositivo con interfaccia I2C.
L’unico problema è superare alcuni “scogli” per riuscire a programmarla tramite il normale IDE di Arduino; in giro c’è una moltpelicità di guide che spiegano trucchi e schemi elettrici vari per riuscire a programmare il modulo Digispark con l’arduino IDE usando una Arduino Uno come “ponte”…. ma sono obsoleti, non ce n’è più bisogno, ora si può semplicemente collegare il dispositivo al PC e caricarci direttamente lo sketch. Però bisogna seguire alcuni accorgimenti:
- Il problema dei driver
- Il problema del LED
- Il problema del mancato riconoscimento USB (suono continuo di connessione/disconnessione)
- Il problema della porta seriale
I driver
Servono dei driver specifici, che potrebbero non venire installati automaticamente quando si installa Arduino IDE, quindi ecco il link per scaricarli
Il LED
Esistono diverse varianti della board (rev2, rev3, rev4,…); sono identiche tranne per il pin a cui è collegato il LED: a volte 0, a volte 1; se è collegato al pin 0, non è possibile comunicare con dispositivi I2C, quindi va scollegato.
Mancato riconoscimento USB (suono continuo di connessione/disconnessione)
Connettendo il dispositivo a una porta USB, si sente inizialmente il classico suono di disconnessione, ma dopo 5 secondi si sente quello di disconnessione, poi di nuovo quello di connessione, e così via all’infinito.
Il problema è che… va bene così, è così che deve funzionare, non è rotto. E’ solo che va programmato in modo diverso da Arduino: prima di connettere il Digispark, bisogna avviare l’upload dello sketch, e solo dopo, quando è l’IDE stesso a chiederlo, bisogna collegare il dispositivo, e lo sketch verrà caricato. E una volta caricato il primo sketch, non ci sarà più il problema di connessione/disconnessione continua.
Dal manuale ufficiale:
You do not need to plug in your Digispark before invoking upload. Hit the upload button. The bottom status box will now ask you to plug in your Digispark – at this point you need to plug it in – or unplug and replug it. You’ll see the upload progress and then it will immediately run your code on the Digispark. If you unplug the Digispark and plug it back in or attach it to another power source there will be a delay of 5 seconds before the code you programmed will run. This 5 second delay is the Digispark Pro checking to see if you are trying to program it.
La porta seriale
Il problema della porta seriale… è che non c’è porta seriale, quindi il comando Serial.print() non è implementato e il Serial Monitor dell’IDE non si può usare.
Si può ovviare al problema installando una libreria a parte:
- http://digistump.com/wiki/digispark/tutorials/digicdc (servono driver particolari per la porta seriale virtuale che viene creata; consuma moltissima RAM)
- http://digistump.com/wiki/digispark/tutorials/digiusb (obsoleta) – mettendo all’inizio dello sketch un #include <DigiUSB.h> si può poi usare l’istruzione DigiUSB.println()
Altri metodi di debugging: link
Sensori I2C
Il digispark può leggere dati da sensori digitali tramite protocollo I2C (pin SDA e SLK):
- SDA: pin 0
- SCL: pin 2
Installando la scheda nell’IDE Arduino si rende disponibile uno sketch per la scansione di tutti i dispositivi I2C collegati (i2cscanner.ino)
Emulazione tastiera
Fortunatamente il Digispark non ha solo problemi, ma anche vantaggi; per esempio, nonostante le minuscole dimensioni, poichè gira a 16MHz e va a 5V, a differenza di altre board è in grado di emulare dispositivi HID (joystick, tastiere, mouse,…)
Connessione Android USB
Essendo in grado di emulare una tastiera, il Digispark può essere anche connesso via USB a uno smartphone che supporti l’OTG; il che significa che in sostanza si può usare per collegare a un dispositivo Android un qualunque sensore dotato di interfaccia I2C. Sorgenti di esempio.
Manuale d’uso per timer KKMoon 12V con display e 3 tasti

K1: tenere premuto per 2 secondi per entrare in modalità programmazione (programmi da P-1 a P-4).
K2: seleziona cifre partendo da sinistra
K3:
A cifra lampeggiante: incrementa di 1.
A cifre già prograsmmate: spostamento punto decimale.
P-1:
Accensione: relè 0, attesa segnale
Segnale: relè 1, timer T1, relè 0, fine.
P-2:
Accensione: niente
Segnale = Timer T1, relè 1, timer T2, relè 0, fine.
P-3 – Lampeggiatore
Accensione: Relè A, timer T1, relè B, timer T2, ripete all’infinito
Se A e B sono 0 o 1 lo si decide a timer avviato col tasto K1.
Nota: un giorno dura 1440 minuti e il timer può contare solo fino a 999 minuti, quindi può ripetere il ciclo ogni 12 ore, o al massimo ogni 16,65 ore.
P-4:
Accensione: Relè 0, attesa segnale
Segnale: Relè 1, timer T1, Relè 0, fine.
Specifiche:
Tensione di funzionamento: DC 12V / DC 24V (opzionale)
Intervallo di tempo (impostabile): 0,1 ~ 99,9 secondi; 1 ~ 999 secondi; 1 ~ 999 minuti
Segnale di tensione: DC 4 ~ 20V
Capacità di uscita: può controllare il carico entro DC 30V 10A o 10A 220V AC
Dimensionamento di fusibili
Qualche anno fa, quando ho rifatto da zero l’impianto elettrico dello scooter elettrico Ecojumbo 5000, ho avuto delle belle difficoltà a trovare normative e specifiche su come dimensionare correttamente fusibili per alte correnti continue.
Ecco ora un documento che fa un po’ di luce sulla questione:
- Parametri del circuito
- Corrente nominale (normal operating current)
- Corrente massima di guasto (maximum fault current)
- Parametri del fusibile
- Tensione massima di lavoro (voltage rating)
- Corrente nominale (“current rating”)
- Corrente di corto circuito o Corrente di rottura o Corrente di sovraccarico (“short circuit rating” o “breaking capacity” o “interrupting rating”)
La corrente di corto circuito del fusibile deve essere maggiore o uguale della corrente massima di guasto del circuito, in modo che sia impossibile far scorrere nel circuito una corrente superiore alla sua corrente massima di guasto.
CCC >= CMG
Data la corrente nominale indicata nel datasheet, un fusibile non deve essere attraversato da più del 75% di questa corrente; o, detto al contrario, se devo permettere il passaggio di una corrente I in un circuito, il fusibile deve avere una corrente nominale di almeno I/0.75. Il valore 0.75 va poi moltiplicato per il fattore di derating dovuto alla differenza di temperatura rispetto alla temperatura ambiente, graficato nel datasheet.
Questo però è valido a 25°C in spazio aperto, condizioni standard utili solo per confrontare componenti diversi; bisogna però tenere conto del derating, ossia del cambio dei valori di specifica, al variare delle condizioni ambientali, essendo per definizione i fusibili componenti estremamente sensibili alle temperature.
Tensioni tipiche di specifica dei fusibili sono: 32V, 63V, 125V, 250V e 600V. Il comportamento di un fusibile resta lo stesso al variare della tensione nel range ammesso, mentre cambia molto al cambiare della corrente. Il documento non specifica come rapportare la tensione di lavoro in corrente continua con quella in corrente alternata, ma è presente un elenco di vari fusibili per i quali sono indicate le tensioni massime di lavoro sia in continua che in alternata, dai quali si evince che la tensione continua tollerata da un fusibile è 5 volte più grande di quella tollerata in regime di corrente alternata.
Il parametro principale per dimensionare un fusibile è quello che lo fa rompere: “overload current” o “corrente di sovraccarico“, che però non va mai da sola, ma è accompagnata dal tempo di apertura o tempo di rottura, cioè per quanto tempo può scorrere quella corrente nel fusibile prima che questo si fonda e apra il circuito. Questi due parametri del fusibile dipendono dalla “maximum fault current” (corrente massima di guasto) del circuito, cioè la corrente massima che si prevede possa scorrere nel circuito in caso di guasto.
Sensori di piccole correnti per ESP32/ESP8266 e Arduino
- HiLetgo INA219 (due pezzi per 9,00 euro o uno per 7 euro con Prime)
- Datasheet
- Libreria Arduino con sorgenti di esempio
- Lettura digitale
- Fornisce tensione, corrente e potenza
- Corrente massima leggibile: +/- 3A in 4096 step di 0.8mA
- Tensione massima leggibile : 26V
- Alimentazione 3.3V o 5V
- Interfaccia I2C
INA219 (digitale)
L’INA219 non misura solo la corrente ma anche la tensione, da cui è possibile calcolare la potenza in Watt e il consumo energetico in Wh.
Comunica digitalmente coi microcontrollori tramite protocollo I2C a 2 pin (SDA e SCL), il che rende possibile l’utilizzo in contemporanea con un display I2C anche in caso di scarsità di pin sul microcontrollore.
MAX471 (analogico)
Dimensionamento della resistenza esterna su cui leggere la tensione con una Arduino o simili:
- Rout [kOhm] = Vcc / (ILOADmax [A] * 0.5mA/A) = 2 * Vcc / ILOADmax
- Vout [V] = 0.5 mA/A * Rout [kOhm] * ILOAD [A]
- ILOADmax è la portata del MAX471, che è 3A, quindi:
- Rout = 2*Vcc/3
- Vout = I*Vcc/3
- ESP32/ESP8266:
- Rout = 2*3/3 = 2 kOhm per avere una variazione di 1mV per ogni mA; (2 resistenze di valore standard 1 kOhm in serie)
- Vout [V]= I [A]
- L’ESP32 legge i valori da 0 a 3.3V in 4096 step, quindi ogni step corrisponde a 0.80 mV letti e a 0.80 mA misurati.
- Arduino
- Rout = 2*5/3 = 3.3 kOhm
- Vout [V]= 1.7 * I
- Arduino legge i valori da 0 a 5V in 1024 step, quindi 4.9 mV per ogni step, che corrisponde a 8.3 mA misurati per ogni step.
- ESP32/ESP8266:
Misure di alta tensione
Per misurare invece i consumi di rete a 230V, come sensore di tensione conviene usare un dispositivo isolato galvanicamente, in modo da evitare che per errore sulla Arduino finiscano 230V, come il dispositivo ZMPT10B che regge fino a 250V alternati; come sensore di correntesi può usare un ACS712 (variante ACS712ELCTR-20A-T da +/- 20A o ACS712ELCTR-30A-T da +/- 30A), che però richiede il “taglio dei fili” perchè funziona tramite resistenza di shunt.
Sensore di corrente senza contatto: SCT-013-000
Hacking Icaro – Centralina GSM: Man in the Middle Attack – puntata 3
Pinout
Terminata l’individuazione dei pin TX/RX da intercettare tramite apposito cavo:

Pinout centralina GSM Zhidou/Greengo Icaro
Sul connettore nero sono i pin 33 e 34, ergo l’11mo e il 12mo partendo dal pin 23 (in basso nella figura qui sopra).
Il pin marchiato RX sul modulo va, da datasheet, collegato a RX sulla centralina, cioè qui viaggiano i dati provenienti dal modulo GSM, ergo le risposte del server. Il pin da “manomettere” e intercettare è quindi il TX, che corrisponde dal pin 33 sul connettore nero, l’undicesimo partendo dall’estremità del connettore contrassegnata dal n.23.
Il cavo
Un possibile cavo utilizzabile per questo hacking è il SAMTEC FFSD-25-D-03.00-01-N-R (datasheet):
- FFSD = famiglia
- FF passo 1.27 mm
- S = socket (femmina); può andar bene anche la famiglia FFMD, con due spine maschio invece che due femmine, ma servirà un adattatore femmina-femmina; col connettore femmina-femmina (lettera S) serve invece un adattatore maschio-maschio, o semplicemente di inserire a mano 50 pin in uno dei due connettori femmina, in modo che diventi maschio.
- D = doppia fila di pin
- DA EVITARE le famiglie TCSD e TCMD, che hanno il passo sbagliato (2mm invece che 1.27mm)
- 25 = 25 pin per fila
- D = Doppio connettore
- 03.00 = 3 pollici di lunghezza (7.5 cm)
- 01 = valore fisso
- N = presente tacca di polarizzazione
- R = verso invertito del secondo connettore:

L’ultima lettera va bene anche -O oppure -M (si tratta di cavi con 3 connettori invece che 2, uno dei quali invertito).
Il progetto
Questo è ciò che va realizzato per modificare il server a cui vengono inviate le telemetrie:

hacking icaro GSM – connessioni
Questa è l’unica connessione realmente necessaria, sia per modificare il server di invio dati, sia per loggare i dati stessi, ma chiaramente può essere utile collegarsi anche al pin 34(RX) per leggere e loggare la risposta del server.

{kind=link}
leave a comment